- Real-Time Plant Simulation
- Rapid Control Prototyping (RCP)

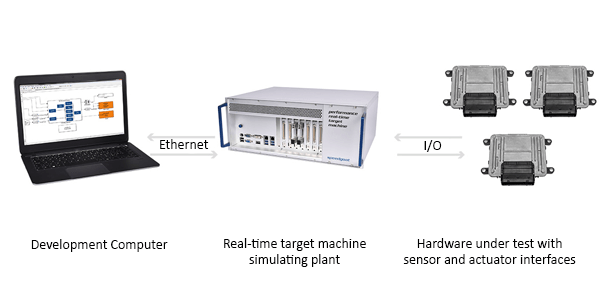
Real-Time Plant Simulation
Our real-time target machines provide you with convenient and powerful solutions for running complex physical models designed with MATLAB & Simulink, Simulink Real-Time, Stateflow, Simscape, Simscape Electrical (formerly SimPowerSystems), or any other MathWorks software tool on highest performance multi-core CPUs and FPGAs.
Specialized I/O modules installed in the target machine allow you to simulate devices such as absolute and incremental encoder sensors, high precision thermocouples, strain gauges, transformers with LVDT/RVDT or synchro/resolver interfaces, or power electronics components by leveraging FPGA-based modules with analog and digital I/O. Many communications protocols are available, including CAN, FlexRay, ARINC 429, MIL-STD-1553, EtherCAT, real-time UDP and XCP.
Common Applications
- Combustion engines, and electric and hybrid motors
- Vehicle, airplane, and satellite components
- Battery pack emulation
- Environmental conditions
- Power electronics including inverters, and grid simulation
- Structural simulations
- Fault insertion
Benefits
- Save costs and reduce risks
- Shorten time-to-market

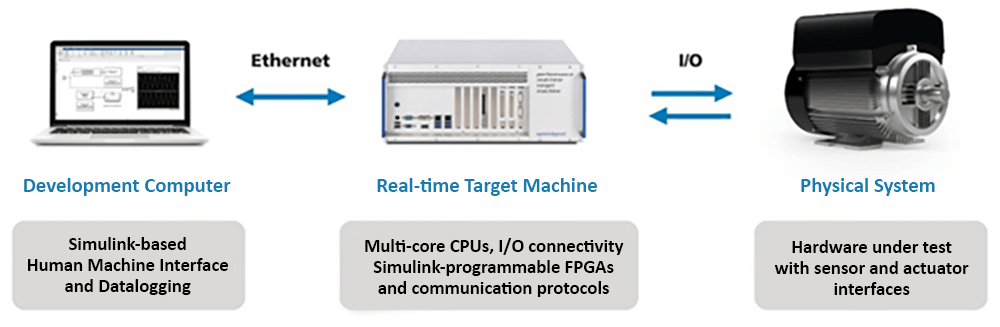
Rapid Control Prototyping (RCP)
Real-time target machines acting as controllers provide the quickest possible path from MATLAB & Simulink desktop simulation to real-time testing with hardware: autogenerate and download a real-time application from Simulink at the click of a button, connect I/O with your hardware, and get started right away with on the fly testing and tuning of software and hardware designs.
Unlike embedded controllers, Speedgoat real-time target machines allow control designs to be rapidly run, monitored and tested with your hardware. The flexible expansion concept, and highest performance multi-core CPUs and FPGAs for algorithmic execution ensure that your I/O, communications protocol and sample rate requirements can be met now and in the future.
Common Applications
- Rapid test and iteration of control strategies with real hardware such as drives and motors (PM synchronous motor, brush-less DC motor, stepper motor)
- High fidelity closed-loop controls leveraging low-latency I/Os and FPGAs
- Real-time testing of controls algorithms against a HIL simulator
- ECU calibration and bypassing using XCP with tools such as Vector CANape™ or ETAS INCA™
- Embedded designs using a real-time system as embedded controller
Benefits
- Save costs and reduce risks
- Shorten time-to-market

